引言
車輛不按既定線路運載、沿途加載旅客、司機疲勞駕駛、車廂內人員滋事等問題,使得已經連帶出的一系列安全隱患、犯罪事件等衍生問題不斷困擾著人們和社會。針對此種情況,本文提出了基于3G網絡的車輛定位和視頻監控系統,減少上述事件的發生,給車輛以及車乘人員更安全的保障。此系統采用了先進的H.264視頻壓縮編碼技術,在不影響質量效果的前提下大大減少了所要傳輸的數據量,并且以3G無線寬帶網絡為傳輸媒介,既可以克服傳統固定網絡有線方式對地理位置變化或處于運動中的監控不能實現的問題,提供更加靈活組網方式,滿足不能架設線路的監控點的監控需求,還可以提供比GPRS和CDMA更寬的數據傳輸帶寬,滿足了移動視頻監控的要求。
1 關鍵技術分析
1.1 3G技術
第三代移動通信技術(3G),是指支持高速數據傳輸的蜂窩移動通訊技術。CDMA系統以其頻率規劃簡單、系統容量大、頻率復用系數高、抗多徑能力強、通信質量好、軟容量、軟切換等特點顯示出巨大的發展潛力,也因此成為第三代移動通信系統的技術基礎。目前在我國3G存在3種標準:CDMA2000,WCDMA,TD-SCDMA。CDMA2000從IS-95平滑升級,技術成熟性最高,有明確的提高頻譜利用率的演進路線,在國外有預商用試驗網,W-CDMA來源于IS-95CDMA技術,有較高的擴頻增益,發展空間較大,在歐洲成為優選。TD-SCDMA已成為國際電聯和3GPP標準,目前處于與歐洲TDD標準的融合階段,技術成熟性一般,有較高的頻譜利用率。3G可以提供室內、室外和行車環境中分別支持2Mbps、384kbps和144kbps的傳輸速度。
1.2 圖像壓縮技術
為了適應移動設備,同時也為了提高數據傳輸速度、降低網絡數據流量、保證監控的實時性,有必要對車載端攝像頭采集的數據進行編碼壓縮。文中采用H.264標準將攝像頭采集的圖像系列壓縮編碼成流媒體。H.264的編解碼流程主要包括5個部分:幀間和幀內預測、變換和反變換、量化和反量化、環路濾波、熵編碼。通過該流程,使得H.264具有極高的視頻壓縮比。在同等圖像質量條件下,H.264的壓縮比是MPEG-4的1.5~2倍。以下簡要分析H.264/AvC編解碼原理。
H.264/Avc編解碼器包括2個數據流通道:前向通道(從左向右)和重構通道(從右向左)。其編碼器的基本結構如圖1所示。輸入幀Fn用來進行編碼,該幀在宏塊(宏塊指的是在原始圖像中16×l6點陣)單元中進行處理。一個預測宏塊P被基于重構的幀所構建。在內部模式中,P從當前己經編碼過、解碼過和重構的幀Fn的采樣所獲得。在中間模式中,P通過源自一個和多個參考幀的運動補償預測中形成。
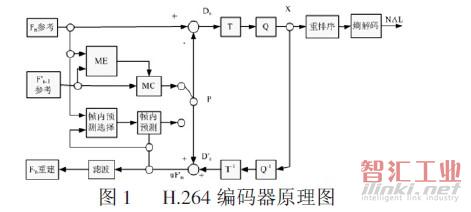
在圖1中,參考幀表示為先前編碼幀F‘n-1,預測P被從當前宏塊中減去以產生一個殘余的或者有差異的宏塊Dn。通過轉換(使用塊傳輸)和量化以給出X(量化轉換系數集)。這些系數被重新排列并且進行嫡編碼。嫡編碼的系數,隨同用來解碼宏塊的信息(諸如宏塊的預測模式,量化步數大小,運動矢量信息)形成壓縮的比特流。該比特流傳送給網絡抽象層(NAL)用來傳輸或者存儲。為了實現下一宏塊或下一個圖像的預測,編碼器包含一個解碼器,對量化變換系數(圖中標注為X)進行與解碼器解碼相同的反量化和反變換過程,導出解碼預測殘差(圖中標注為D’n,這與原來的殘差塊Dn并不完全相同,因為量化和反量化的過程中產生了信息的耗損),解碼預測殘余D‘n與預測P相加,得到重建的宏塊uF’n,送到去塊效應濾波器,得到當前重建幀F‘n,同時將其存儲以供將來做后續幀的幀間預測模式的參考幀。
目前主要使用的視頻格式有QCIF(176*144/dpi)、CIF(352*288/dpi)、4CIF(704*576/dpi)。
這里基于實際的需求選擇CIF格式。則每幀圖像的大小為352×288×24=2433024bit,即2433024/1024=2376kbit,這里選擇H.264的250:1的壓縮比例的話,壓縮后的圖像大小就為2376/250=9.5kbit,那么按照3G網絡在車輛運動中的速度要求144kbit/s,這樣每秒可傳幀的數量為15~16幀,這樣就能實現較為滿意的監控效果(影像播放達不到15幀/s時將產生明顯跳躍感)。
2 車載終端設計
2.1 車載終端硬件設計
車載模塊終端如圖2所示,主要由4部分組成:
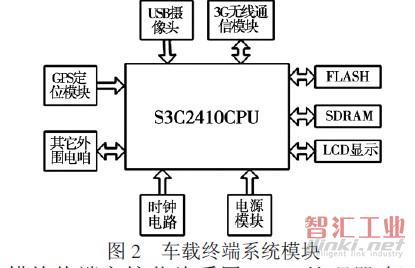
ARM處理器、GPS模塊、3G無線數據發送模塊、USB攝像頭。ARM處理器是整個終端的CPU,負責調配和控制各個模塊的工作,其主要功能是通過GPS獲取車輛當前的位置信息,通過USB攝像頭獲取車輛內情況和司機駕駛狀況,把這些視頻或圖像數據信息以H.246標準格式壓縮,并整合成能由串口發送出去的特定格式,最后由3G無線模塊發送到無線網絡,最終通過INTERNET或PSTN(公共陸地網絡)網絡傳回監控中心主機。下面簡單介紹各個模塊性能:
模塊終端主控芯片采用ARM處理器,相對于以8位/16位單片機作為中央處理器的終端而言,無論是功能上,還是人機接口都有顯著提高,是微處理器技術的重要發展。這里選用Atmel公司的ARM920T處理器為主控制器。該內核屬于專門用于工業控制的ARM芯片,有較好的工業參數,同時集成了豐富的系統應用外設及標準接口,在200MHz主頻下處理速度大大提高,此外它還有豐富的外部設備和優越的數據傳輸特性。
定位信息接收模塊選用Trimble公司的Copernicus-GPS接收機。該模塊支持NMEA0183協議的數據格式。這是一款高靈敏度、高精度、低功耗的微型GPS接收機。能在復雜的條件下也能準確的實施定位功能。
無線通信模塊采用SIMCOM公司的SIM5218模塊,SIM5218是一款3G/HSDPA/EDGE模塊解決方案,在HSDPA解決方案下支持下行速率達7.2Mbps和上行速率為5.76Mbps的數據傳輸服務,這對視頻和圖像等數據量相對較大的信號傳輸而言是非常理想的選擇。在費用方面,3G因為是借助分包交換的技術,所以,網絡使用的費用不是以接入的時間計算,而是以消費者的數據傳輸量來定。
2.2 車載終端程序設計
車載端是一個基于ARM的Linux系統平臺,其任務主要包括獲取GPS定位數據和視頻采集數據,圖像或者視頻的壓縮編碼,將定位數據和視頻、圖像數據通過串口輸送到3G模塊緩沖區,最后通過無線網絡發送出去。
首先,要根據CPU與外圍設備的具體引腳連接重新裁剪的編譯linux內核驅動,主要包括攝像頭的USB模塊、GPS和3G無線通信的串口模塊等驅動等。
其次,調用linux內核中關于視頻設備的API接口(即Video4Linux)編寫攝像頭采集數據的應用程序。并且,Video4Linux還專門為USB攝像頭定義了數據結構:
structvideo_capabilitygrab_cap;包含攝像頭的基本信息;structvideo_picturegrab_pic;包含設備采集圖像的各種屬性;structvideo_mmapgrab_buf;用于內存映射;structvideo_mbufgrab_vm;利用mmap進行映射的幀信息;由于外設都被當成設備文件,所以如需對設備進行操作時,內核將調用file_operations結構中的open、close、read、write等函數進行操作。采集程序實現過程:
①打開視頻設備,攝像頭在系統中對應的設備文件為/dev/video0,采用系統調用函數grab_fd=open(“/dev/video0”,O_RDWR),grab_fd是設備打開后返回的文件描述符。
②利用ioctl(grab_fd,VIDIOCGCAP,&grab_cap)函數讀取structvideo_capability中有關攝像頭的信息。
③使用ioctl(grab_fd,VIDIOCGMBUF,&grab_vm)函數獲得攝像頭存儲緩沖區的幀信息。
④接著把攝像頭對應的設備文件映射到內存區,具體使用grab_data=(unsignedchar*)mmap(0,grab_vm.size,PROT_READ|PROT_WRITE,MAP_SHARED,grad_fd,0)操作。
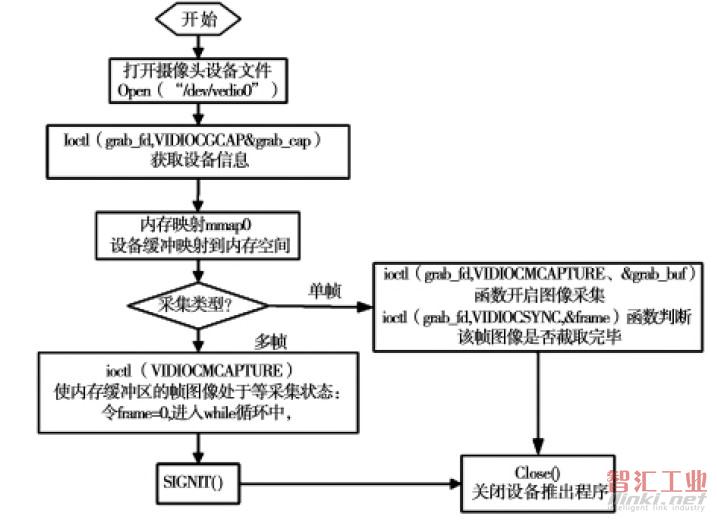
圖3圖像采集流程圖
再次,在該視頻采集與壓縮程序設計中,將修改X264程序的輸入方式,使它直接從內存獲得視頻數據源。程序首先從USB端口采集攝像頭的視頻原始數據,存放在系統內存中,然后由X264進行壓縮,以文件的形式輸出,保存在根文件系統中。
最后,3G無線網絡的通信部分主要涉及到的是AT指令的應用。在選擇可靠性強的TCP方式連接。
下面簡單敘述一下所用到的AT指令:
AT+NETOPEN=“TCP”,《portnumber》激活一個特定的SocketPDP上下文,同時創建一個Socket連接。
AT+TCPCONNECT=“IPaddress”,《portnumber》
嘗試建立一個固定IP地址的TCP服務器連接。
AT+TCPWRITE=《datalength》告知服務器要發送的數據長度,在得到確認后發送相應的數據。
AT+NETCLOSE關閉與服務器的連接,并注銷原來激活的SocketPDP上下文。
此外車載終端的程序流程如圖4所示。
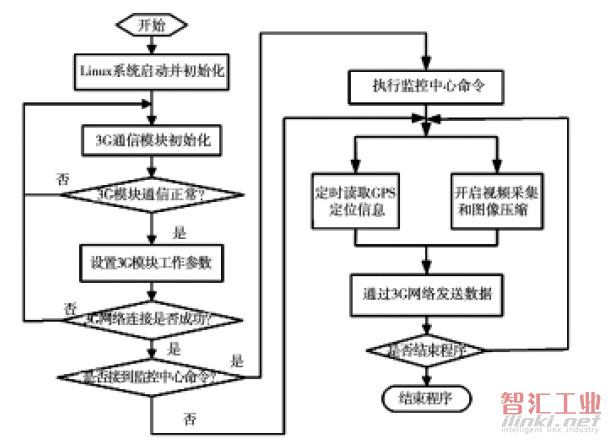
圖4車載終端程序流程圖
3 終端測試效果
該監控終端安裝在試驗車輛上,通過3G無線網絡與監控中心互聯,監控中心配有視頻解碼服務器,以及由C#語言和MapXtreme2005組件(MapXtreme產品是用于創建GIS應用的一套組件)編程設計的監控服務系統,服務系統中用到Socket接口,Socket接口函數是TCP/IP的API(應用程序接口),用來向終端提供無線網絡通路。
經過實驗車輛運行測試后,得到如圖5所示效果。在監控界面左邊地圖上顯示車輛當前運行所在位子,在右邊視頻窗口查看車內監控視頻。從得到的結果看,地圖信息能準確定位,圖像質量基本上能滿足監控要求,待系統完善后應該能得到更理想的效果。
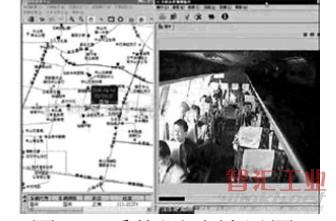
圖5系統測試效果圖
4 結語
本文設計的系統將視頻監控和地理信息系統有機結合在一起,以3G寬帶無線網絡為媒介,提供了一套車輛視頻監控和定位的解決方案。隨著我國3G網絡的普及和蔓延,帶寬限制的問題已將不再成為困擾人們的難題,此外H.264編/解碼器軟硬件實現,使得質量高、價格便宜的移動視頻監控成為市場新寵兒。
(審核編輯: 智匯小新)
分享



