一、精簡回答
如果使用了安全光幕等安全的輸入單元,而使用普通PLC進行一個邏輯控制,整個安全系統的安全等級是不能達到一個比較高的安全等級的。
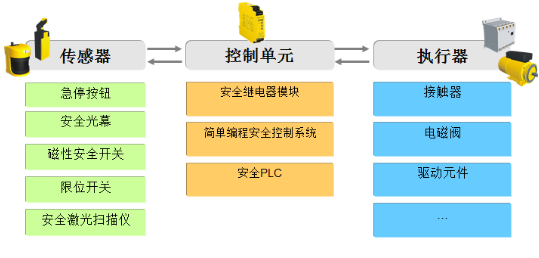
因為普通PLC出錯的幾率會比安全控制器高很多,因此如果需要一個安全系統的整個回路達到比較高的安全等級來進行安全防護,整個系統回路中的所有元器件都需要達到比較高的安全等級,包括輸入傳感器、控制單元以及輸出執行器。
二、詳細說明:
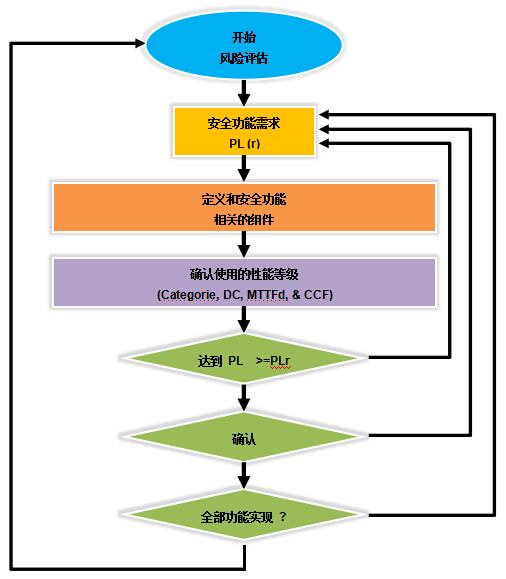
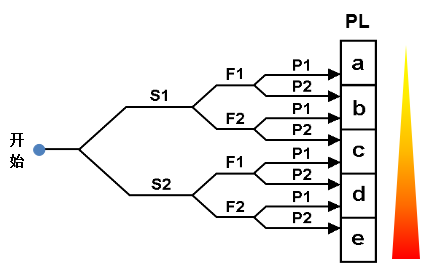
首先,根據機器安全國際標準ISO 13849-1“安全相關控制部分的系統設計方法 (SRP/CS)”,對應的國家標準GB/T 16855.1 2008中的規定,先對機器所有風險進行評估,評定出PLr (Performance Level requirement整個安全系統所需要的安全等級),再進行安全設計,通過對使用元器件的安全性能等級的評定,來確定最終安全系統的PL等級,最終看是否達到了PLr的要求。具體流程如下圖所示:
展開來說:

其中a是低風險,e是高風險
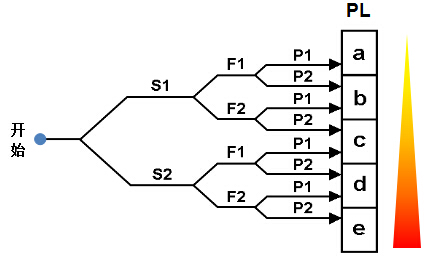
根據上述三個條件,最終確定這個工位危險所要做的安全防護需要達到的操作性能等級PLr.(Performance Level requirement),每種安全功能都要有各自的PLr來對相應的危險進行防護。

評定完PLr之后,就針對不同的危險及其危險程度進行安全回路的設計,包括輸入元件(急停,雙手按鈕,安全光幕,安全光柵,安全門鎖等),控制單元(控制器等),輸出元件(繼電器,接觸器,閥等)。

針對不同的安全功能,計算出整個安全回路總的PL,看最終的結果是否大于等于PLr, 如果滿足要求,即是一個合適的安全設計。如果不滿足要求,需要重新進行設計或者更改一些元器件使系統總的PL大于等于PLr。
如果基于PL的元件結合一系列的控制系統SRC/PS,則總的PL也能夠計算并考慮到以下:
a) 使用元件的最低性能等級 (PL low)
b) PL元件和元件的數量 = N low
下表給出一個簡單的方法來評估整個系統可以達到的PL
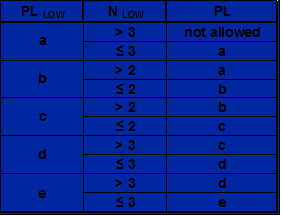
即整個系統要達到某個PL值,整個系統每個元件的PL值至少都要大于等于這個值。

三、簡單舉例
假設一個工位有機器人來取料,然后進入其他工位進行別的操作,人需要經常進出機器人取料的地方放置工件。

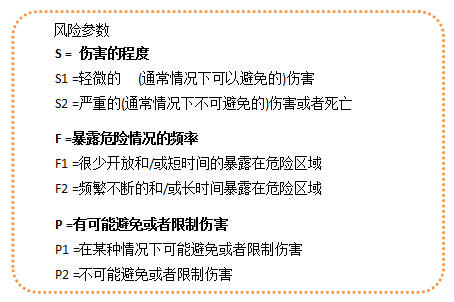
首先評定PLr 由于機器人打到人會造成重傷,所以選擇S2,由于操作工需要頻繁進入這個危險區域,因此選F2,如果機器人打過來,如果速度比較慢,根據操作工的熟練程度以及反應,是可以逃離這個危險的,選擇P1, 最終PLr=PLd.
這樣,根據總系統PL簡易估算表,安全設計需要使用輸入和控制元件都需要至少PLd以上的元件才可以。
由于普通可編程控制器的PL等級是不會超過PLc,因此,整個系統的安全等級是不能滿足PLr=PLd 的要求,因此是不符合安全標準的設計,必須使用PLd以上的安全控制器。
至于單個元件的操作性能等級PL,有些可以從元件的參數表內找到,例如安全光幕,安全掃描儀,安全PLC等。而有些元件是要通過計算來得到的,例如接觸器,安全繼電器模塊等。其中,子系統的PL值可以通過SISTEMA軟件進行計算和評估并生成相應的報告。
(審核編輯: 智匯胡妮)
分享



