引言
在現代社會中,城市路燈設施的功能不僅僅以道路照明為主,同時起到了改善環境質量、促進經濟繁榮、美化城市形象的作用,同時,由于大量的能源消耗和由此引起的能源短缺已使得照明節能成為一項十分迫切的任務,對城市路燈的監控與管理需要一種更加穩定、合理、有效的方法,同時對于路燈的故障監測、節能環保等功能也提出了較高的要求。因此,對路燈的運行狀況進行實時遠程監控變得非常的重要。當前,城市路燈監控系統常采用的傳統控制方法包括光敏控制、定時器控制等,不僅不利于照明節電,而且對路燈故障檢測、照明耗電等難以監控管理。故有必要進行照明用電控制方式的革新,采用先進的數字化、網絡化的控制方式可以從根本上杜絕無謂的浪費,而且可以規范照明用電的管理。利用現有的220V低壓電力線網,通過電力線載波通信技術可以實現遠程控制每盞路燈,調節光照強度,檢測路燈的工作狀態,還可以識別路燈故障。
系統工作原理
該控制系統主要分為主機和終端2個部分,主機部分由計算機、單片機系統和電力線載波模塊組成。主機安裝在路燈監控室內,作為控制系統的中心,在整個控制過程中起到關鍵作用,負責收集、分析終端數據。主機接收終端發來的數據,包括終端地址、指令代碼、數據、效驗碼等,然后效驗收到的數據,如果效驗正確則顯示并執行相應的操作。終端由載波通信模塊和一些外圍電路組成,設置在被控路燈中,根據接收到的信號對路燈進行相應的操作,并負責數據的采集和發送,通過對路燈線路電壓、電流的處理和分析,判斷路燈的工作狀態是否正常,如果出現異常情況,就執行相應的操作,并把相關數據發送給主機。系統總體結構如圖1所示。
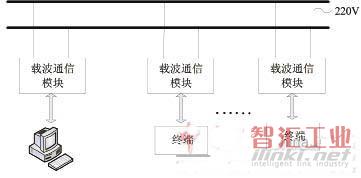
圖1 系統總體結構
控制系統硬件設計
載波通信模塊
載波通信模塊的功能是實現低壓電力線上各個節點間的通信,該模塊由STC89C52單片機和KQ-130F+電力線載波模塊組成,載波通信模塊的電路圖如圖2所示。
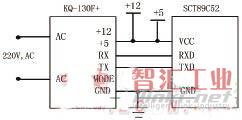
圖2 載波通信模塊
電力載波數據收發模塊是四川科強電子公司專門為在220V交流電帶來的強干擾、強衰減、遠距離要求的環境下進行可靠的傳送數據而特別設計和開發的性價比很高的載波模塊。該模塊工作頻率在120KHz~135KHz,帶寬≤10KHZ,接口波特率9600bps,具有一個起始位、8個數據位、無奇偶效驗位、一個停止位,其中AC端為信號發送接收端,直接接在220V低壓電力線上,+12V為發送電源,+5V為該模塊內部電路的工作電源,MODE為模式選擇端,GND為數字電路地線,RX是載波數據接收端,TX是載波數據發送端,KQ-130F+與單片機采用串行異步通信的方式,單片機將上位機發來的指令經過處理后由串口發送給KQ-130F+載波模塊,該模塊將調制的信號加載到電力線上,在另一端同樣利用載波通信模塊從電力線上接收數據,從而實現了利用電力線做介質進行數據通信的目的。
主機
主機作為系統的控制核心,不但要發送控制命令,還要監控系統的運行狀態,在監控中心內使用一臺計算機可以實時監控和管理路燈的運行狀態。主機由計算機和載波通信模塊組成,照明控制系統的主機結構如圖3所示。
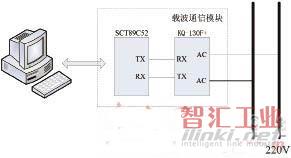
圖3 照明控制系統的主機結構
該系統中計算機與單片機通過模擬串口進行通信,由于STC89C52單片機只有一個全雙工異步串行口,已經被KQ-130F+載波模塊占用,所以使用P3.2和P3.3作為單片機接收端和發送端與計算機進行模擬串口通信。一方面將指令發送給載波通信模塊以實現控制路燈開關和亮度,另一方面單片機將接收到的路燈信號發送給計算機便可實時監控路燈運行狀態,達到遠程智能監控路燈的目的。計算機使用北京亞控科技公司開發的組態王監控軟件,對該系統進行實時監控和管理。組態王kingview6.55是一種新型的工業自動控制系統,是亞控科技根據當前的自動化技術的發展趨勢,面向低端自動化市場及應用,以實現企業一體化為目標開發的一套產品。組態王中提供了modbus通信協議,使用該協議可以方便快速地實現組態王與單片機的數據交換。
終端
終端控制器由載波通信模塊、傳感器、開關模塊等組成。每一個路燈就是一個終端,對應一個固定的地址,終端的載波通信模塊接收到載波信號后,讀出信號中的地址,如果對應地址正確則執行響應的指令,對路燈進行開關控制。傳感器將采集到的路燈電壓、電流等參數轉換成數字信號送給單片機,再由單片機對數據進行處理分析,判斷路燈的工作狀態,如果出現異常情況,就執行相應的操作,通過載波模塊把相關數據發送給主機。主機便可實時監控每一個路燈的運行狀態,實現遠程的路燈故障監測功能。
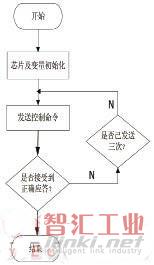
圖4 主機程序的流程圖
系統軟件設計
通信協議設計
根據實際系統的需求,該系統通信協議參照OSI模型進行設計,通信協議幀格式:
有效的通信數據用ASCII碼字符表示,各個部分說明如下:
1) 起始位:0x40(ASCII碼值“@”);
2) 命令字:開燈0x4B(“K”),應答0x18(“↑”);關燈0x47(“G”),應答(“↓”);
傳送數據命令0x44(“D”),應答0x1A(“→”);接收出錯應答0x4F(“?”);
3) 數據長度:表示數據域的長度,0表示無數據域;
4) 數據域:包括地址,終端參數等,其結構隨命令字的不同而改變,每個地址由兩個字節組成,其中主機地址為0。
5)校驗碼:校驗從起始位開始到命令字所有數據進行冗余校驗;
6)結束位:用0x23(“#”)表示一幀字節的結束。
在該路燈控制系統中,通信協議規定了兩種類型的數據幀:命令幀和應答幀。命令幀是由主機向終端發送,應答幀則是由終端向主機發送。由于受到低壓電力線信道干擾的影響,在數據傳送的過程中可能會出現錯誤的數據幀或是在限定的時間內沒收到應答的情況,遇到這種狀況就需要重發相應的數據幀來確保系統的穩定性。
軟件設計
根據系統的總體結構,軟件編程分主機程序模塊和終端程序模塊兩部分。軟件部分編程采用C語言,實現了模塊化設計。主機負責發送指令、收集終端數據并顯示。終端負責監控路燈的狀態,對電壓、電流信號進行處理并通過電力線發送出去。主機程序的流程如圖4所示,終端程序的流程如圖5所示。
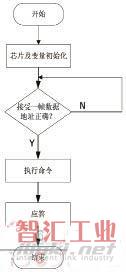
圖5 終端程序的流程圖
結語
本文主要研究了電力線載波通信技術在路燈控制系統中的應用。通過設計硬件電路及通訊協議和系統軟件,利用現有的低壓電力線傳送信號,實現了路燈的遠程監控和管理。該系統不僅提高了管理效率,又節約了能源,具有可靠性高、安裝使用方便、成本低、節電明顯等優點,具有廣闊的應用前景。
(審核編輯: 智匯李)
分享



