設(shè)計(jì)寬范圍高精度測(cè)速電路;通過(guò)對(duì)三種常用轉(zhuǎn)速測(cè)量方法的分析比較。確定采用M法與M/T法相結(jié)合的方法測(cè)速,從理論上保證測(cè)速的寬范圍和高精度;電路設(shè)計(jì)中為了簡(jiǎn)單,快速,準(zhǔn)確的測(cè)速,兩種測(cè)速方法之間采用硬件切換電路完成。克服了軟件切換因工作量大而導(dǎo)致的實(shí)時(shí)控制變差的缺陷:采用片外計(jì)數(shù)器8253彌補(bǔ)了8051硬件資源短缺的不足,利用霍爾元件完成轉(zhuǎn)速到旋轉(zhuǎn)脈沖的轉(zhuǎn)換。實(shí)現(xiàn)了低成本,高性能。
0 引言
在高鐵,地鐵蓬勃發(fā)展的今天,為保證列車安全運(yùn)行,對(duì)列車的運(yùn)行控制提出了更高的要求。要想安全的控制高速運(yùn)行的列車,必需精準(zhǔn)的檢測(cè)列車運(yùn)行的實(shí)時(shí)速度。
1測(cè)速方法的比較
檢測(cè)列車運(yùn)行速度可采取多種方法。其中輪軸轉(zhuǎn)速的檢測(cè)是檢測(cè)列車運(yùn)行速度最常用的方法之一。對(duì)旋轉(zhuǎn)裝置轉(zhuǎn)速的檢測(cè),可采用脈沖計(jì)數(shù)法。脈沖計(jì)數(shù)法只要輪軸轉(zhuǎn)動(dòng)一周,就能產(chǎn)生一個(gè)或多個(gè)固定脈沖。將旋轉(zhuǎn)脈沖送入微處理器計(jì)數(shù),結(jié)合軟件的運(yùn)算處理,便可測(cè)得轉(zhuǎn)速信息。
脈沖計(jì)數(shù)法的關(guān)鍵是如何精確的對(duì)脈沖計(jì)數(shù)。常用的方法有3種,分別為M法,T法和M/T法。
1.1 M法測(cè)速
M法即測(cè)頻率法。M法是在規(guī)定的時(shí)間T內(nèi)檢測(cè)旋轉(zhuǎn)脈沖的個(gè)數(shù)M1來(lái)間接的測(cè)量轉(zhuǎn)速p胡,如圖1(a)所示,轉(zhuǎn)速N的計(jì)算公式為:

式中n為輪軸每轉(zhuǎn)動(dòng)一周產(chǎn)生的脈沖個(gè)數(shù)。
該計(jì)數(shù)法的檢測(cè)時(shí)間為定值T.由于檢測(cè)起止時(shí)間的隨機(jī)性,會(huì)導(dǎo)致極端情況下產(chǎn)生±1個(gè)旋轉(zhuǎn)脈沖的誤差,因此,在轉(zhuǎn)速較高或轉(zhuǎn)動(dòng)一周產(chǎn)生的旋轉(zhuǎn)脈沖個(gè)數(shù)較多的情況下。測(cè)量精度較高。故M法適用于檢測(cè)高速旋轉(zhuǎn)的被測(cè)對(duì)象。
1.2 T法測(cè)速
T法即測(cè)周期法。T法是測(cè)量相鄰兩個(gè)旋轉(zhuǎn)脈沖之間的時(shí)間間隔即旋轉(zhuǎn)脈沖的周期,經(jīng)T法計(jì)算間接測(cè)得速度的嘲。
通常做法是在旋轉(zhuǎn)脈沖的一個(gè)周期對(duì)已知的高頻時(shí)基脈沖計(jì)數(shù),如圖l(b)所示,然后通過(guò)式(2)計(jì)算可得到被測(cè)對(duì)象的旋轉(zhuǎn)速度口一。
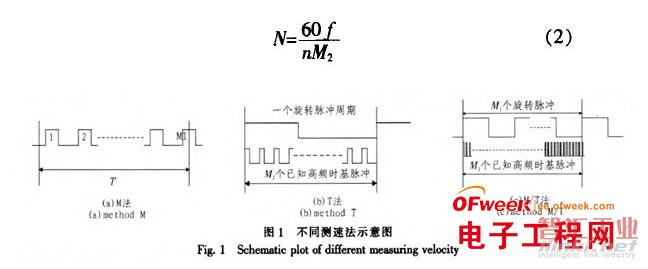
式(2)中,N,為被測(cè)對(duì)象的轉(zhuǎn)速,n為輪軸每轉(zhuǎn)動(dòng)一周產(chǎn)生的脈沖個(gè)數(shù)。廠為已知高頻脈沖的頻率,尬為在一個(gè)旋轉(zhuǎn)脈沖周期內(nèi)包含的高頻時(shí)基脈沖的個(gè)數(shù)。
T法測(cè)速是在一個(gè)旋轉(zhuǎn)脈沖周期內(nèi)對(duì)已知的高頻時(shí)基脈沖計(jì)數(shù),在極端情況下也會(huì)產(chǎn)生±1個(gè)高頻時(shí)基脈沖的誤差。
用T法測(cè)速,轉(zhuǎn)速越高,測(cè)量誤差越大,因此,T法適用于低速檢測(cè)。
1.3 M/T法
M/I.法即在檢測(cè)時(shí)間T內(nèi),既測(cè)量旋轉(zhuǎn)脈沖的個(gè)數(shù)M1,又測(cè)量已知高頻時(shí)基脈沖的個(gè)數(shù)尬,然后通過(guò)式(3)計(jì)算出被測(cè)對(duì)象的轉(zhuǎn)速嗍。

M/T 法是M法和T法的結(jié)合。在測(cè)速過(guò)程中由于周時(shí)對(duì)旋轉(zhuǎn)脈沖和高頻時(shí)基脈沖兩種脈沖計(jì)數(shù)。只要“同時(shí)性”處理得當(dāng)。無(wú)論在高速還是低速檢測(cè)中都有較高的檢測(cè)精度,但該法存在一個(gè)檢測(cè)時(shí)間T的合理選擇問(wèn)題。如果檢測(cè)時(shí)間T太小,會(huì)出現(xiàn)低速時(shí)將速度誤測(cè)為0,如果T太大,則不能快速的測(cè)出速度,影響測(cè)速的實(shí)時(shí)性。
綜上所述,M法適合檢測(cè)高速旋轉(zhuǎn)的被測(cè)對(duì)象,T法則適合檢測(cè)低速旋轉(zhuǎn)的被測(cè)對(duì)象。M/I法集M法和T法的優(yōu)點(diǎn)于一身,理論上測(cè)速范圍較寬,但在實(shí)際操作中,檢測(cè)時(shí)間T的選擇是個(gè)難點(diǎn),檢測(cè)時(shí)間即采樣周期T選擇,直接影響測(cè)速的精度。因此要在寬范圍內(nèi)可靠且精確的測(cè)速,避免低速誤測(cè)為0,可將T法和M/I.法相結(jié)合,即在低速時(shí)采用T法測(cè)速。而在中速和高速時(shí)采用脅T測(cè)速。
2測(cè)速模塊設(shè)計(jì)
2.1模塊組成
基于霍爾傳感器的高精度、寬范圍測(cè)速模塊如圖2所示。測(cè)速傳感器選擇霍爾元件。霍爾元件因具有尺寸小,質(zhì)量輕,無(wú)觸點(diǎn),外圍電路簡(jiǎn)單,頻響寬,動(dòng)態(tài)性能好,壽命長(zhǎng),調(diào)試方便等諸多優(yōu)點(diǎn),故選用霍爾元件將輪軸轉(zhuǎn)速轉(zhuǎn)化成一系列的旋轉(zhuǎn)脈沖信號(hào),轉(zhuǎn)速與旋轉(zhuǎn)脈沖信號(hào)的個(gè)數(shù)成正比。
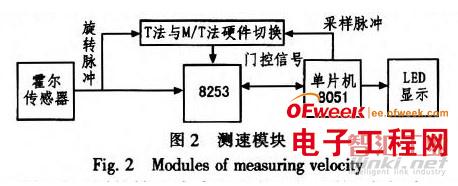
通過(guò)對(duì)不同的轉(zhuǎn)速脈沖測(cè)量方法的比較。確定采用T法與M/T相結(jié)合的測(cè)速方法。以確保寬范圍的高精度測(cè)速。T法與M/T法的切換是通過(guò)硬件切換電路完成的,硬件切換電路在單片機(jī)產(chǎn)生的采樣脈沖和霍爾元件產(chǎn)生的旋轉(zhuǎn)脈沖共同作用下,產(chǎn)生用于控制8253中計(jì)數(shù)器的門控信號(hào)。保證中高速時(shí)采用M/T法測(cè)速,低速時(shí)采用T法測(cè)速圈。
該測(cè)速系統(tǒng)需一個(gè)定時(shí)器產(chǎn)生采樣脈沖和高頻時(shí)基脈沖,需兩個(gè)計(jì)數(shù)器分別對(duì)高頻時(shí)基脈沖和旋轉(zhuǎn)脈沖計(jì)數(shù)。而8051中只有兩個(gè)定時(shí),計(jì)數(shù)器,所以本系統(tǒng)擴(kuò)展了一片8253計(jì)數(shù)芯片,8051的To用作定時(shí)器,結(jié)合循環(huán)子程序產(chǎn)生采樣脈沖和高頻時(shí)基脈沖,而8253在805l和硬件切換電路的控制下分別由其O,1兩個(gè)計(jì)數(shù)器完成對(duì)高頻時(shí)基脈沖和旋轉(zhuǎn)脈沖的計(jì)數(shù)功能。
2.2硬件設(shè)計(jì)
1)霍爾開關(guān)電路
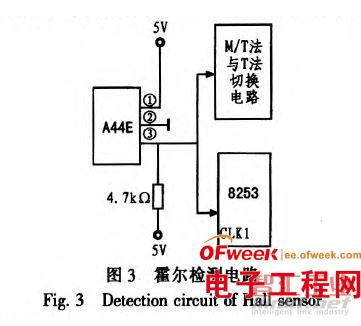
A44E屬開關(guān)型霍爾元件,其工作電壓為4.5~18 V,其輸出信號(hào)符合7兀L電平標(biāo)準(zhǔn),最高測(cè)速頻率達(dá)1 MHz.A44E有3個(gè)引腳,第1引腳接電源,第2引腳為接地引腳,第3引腳為輸出引腳,霍爾測(cè)試電路如圖3所示。其3引腳輸出的旋轉(zhuǎn)脈沖分別送至硬件切換電路和8253的計(jì)數(shù)器1的時(shí)鐘的計(jì)數(shù)器門控信號(hào)和計(jì)數(shù)器1的時(shí)鐘信號(hào)。
2)硬件切換電路
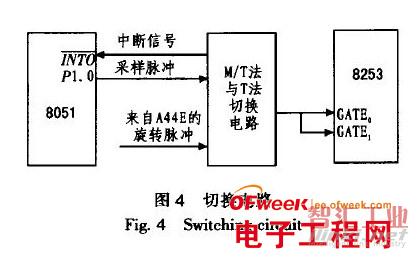
硬件切換電路的功能是完成兩種測(cè)量方法之間的自動(dòng)切換。硬件切換電路的控制關(guān)系如圖4所示,具體的硬件電路詳見(jiàn)參考文獻(xiàn)5.在輸出采樣脈沖的P1.O輸出高電平。且有旋轉(zhuǎn)脈沖的上升沿到來(lái),硬件切換電路輸出高電平,控制8253的O,1兩個(gè)計(jì)數(shù)器的門控端,啟動(dòng)計(jì)數(shù)器開始計(jì)數(shù);當(dāng)P1.0輸出低電平,且有旋轉(zhuǎn)脈沖的上升沿來(lái)時(shí),切換電路輸出低電平,8253的門控信號(hào)無(wú)效,停止計(jì)數(shù),同時(shí)硬件切換電路產(chǎn)生中斷請(qǐng)求信號(hào),8051收到中斷請(qǐng)求后,讀取8253中兩個(gè)計(jì)數(shù)器的計(jì)數(shù)結(jié)果,并利用式(3)計(jì)算出轉(zhuǎn)速。該電路能保證在低速時(shí)測(cè)得一個(gè)完整的旋轉(zhuǎn)脈沖及這個(gè)旋轉(zhuǎn)脈沖周期內(nèi)的高頻時(shí)基脈沖個(gè)數(shù),8051依然用公式(3)計(jì)算速度,只是此時(shí)肘l=l,式(3)與式(2)完全相同,采用的是T法測(cè)量轉(zhuǎn)速。
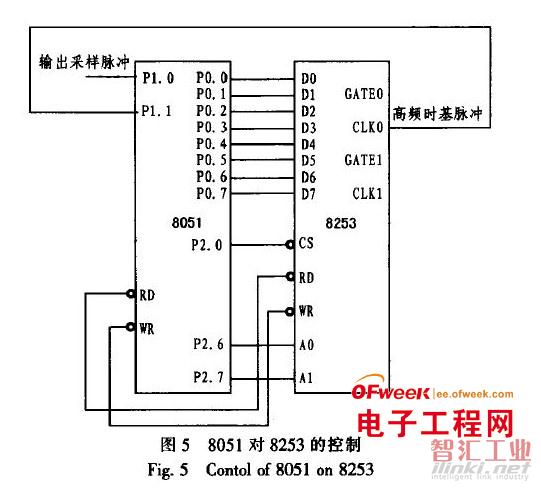
3)805l對(duì)8253的控制
8051對(duì)8253的控制如圖5所示。805l的T0作定時(shí)器,在I/O口P1.1輸出高頻時(shí)鐘脈沖送給8253的計(jì)數(shù)器0作為時(shí)鐘信號(hào);T0和循環(huán)子程序結(jié)合,在I/O口P1.O輸出采樣脈沖,送至切換電路,和旋轉(zhuǎn)脈沖共同控制硬件切換電路產(chǎn)生門控信號(hào)啟動(dòng)或停止8253的O,l兩個(gè)計(jì)數(shù)器:8051的TD控制8253的TJD,TD為低電平時(shí)。8051讀取8253兩個(gè)計(jì)數(shù)器的計(jì)數(shù)結(jié)果,805l的i隋控制8253的麗,i面為低電平時(shí),8051將數(shù)值寫入8253的計(jì)數(shù)器中;用I/O口P2.7.
P2.6控制8253的端口控制選擇信號(hào)A1A0,控制對(duì)8253中O,1,3三個(gè)計(jì)數(shù)器和控制字寄存器的讀寫操作,該設(shè)計(jì)中僅用8253的0,1兩個(gè)計(jì)數(shù)器。當(dāng)AlA0=00,在讀寫信號(hào)控制下對(duì)8253的計(jì)數(shù)器0進(jìn)行讀寫操作,A1A0=Ol,在讀寫信號(hào)控制下對(duì)8253的計(jì)數(shù)器1進(jìn)行讀寫操作;P2.0控制8253的片選端CS.
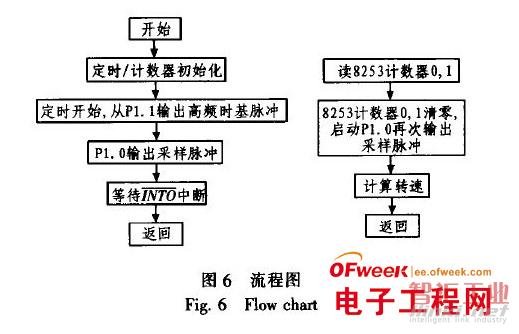
2.3軟件設(shè)計(jì)
基于8051的片外計(jì)數(shù)的轉(zhuǎn)速測(cè)量流程如圖6所示。
3結(jié)論
本文所設(shè)計(jì)的測(cè)速系統(tǒng)由于采用了T法和M/T法兩種測(cè)速方法的結(jié)合,避免了M/T法中因測(cè)量時(shí)間T選擇不當(dāng)引起的低速誤測(cè)為0或?qū)崟r(shí)性差的問(wèn)題,從方法上保證寬范圍精確測(cè)速。測(cè)速方法的切換采用了硬件切換。克服了軟件切換因軟件工作量大而導(dǎo)致的實(shí)時(shí)控制變差的缺陷嘲。采用霍爾傳感器產(chǎn)生旋轉(zhuǎn)脈沖,具有低成本,高性能,抗干擾能力強(qiáng)等優(yōu)點(diǎn)。
(審核編輯: 智匯李)
分享
品專題")
升級(jí)")

器人與智能制造")