數字化與工業 4.0 中最具有創新性的發展就是實現了人類與機器人的合作。幾年前看起來還像是異想天開的想法,如今已經取得了極大進展。
然而,這種更像是未來世界的工作,同時又向我們提出了許多問題:人類與機器人之間的協作到底如何進行?工業 4.0 是否能夠與人體工學兼容?
機器人同事你也可以有
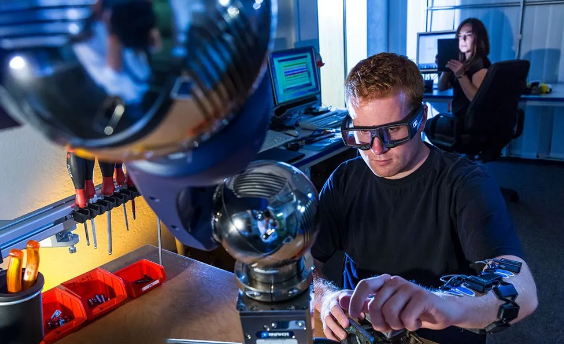
亞琛工業大學的工業工程及人因研究所(IAW)的助理研究員 Henning Petruck 專注于人機協作研究——一種人與機器人毫無障礙地配合工作的合作形式。
Petruck 是德國研究基金會(DFG)資助的“生產互聯網”精英集群項目中的研究生,他正在使用基于 item 工作臺系統專門設計的工作間,來研究如何利用機器人使組裝人員的工作更輕松。
靈活的、符合人體工學的工作協同組裝工作間(CoWorkAs)的基本理念是讓機械手臂向工人傳遞零部件和工具,從而實現以與機器人物理接觸為核心的真正的人機協作。
“工人可以專注于生產過程,用不著再去四處尋找需要的零部件,只需要做好手里的組裝工作,”Petruck 解釋說。
一個框架結構帶四根立柱與高度可調的工作臺和材料供應與拾取系統,就能實現這一目標。還有兩個位于頭頂上方的線性軸連接機械手臂。

除了機械手臂,整個工作間都是 item 的產品,包括工具和監控器支架等擴展配件。項目管理團隊在最初選擇供應商時,人體工學發揮了關鍵作用。“在展會上與 item 討論后,他們為我們設計出一套方案。我們非常喜歡這種靈活的、模塊化的、高度可調的方案,”Petruck 說。整個工作間連接在一起,可以完全根據使用者的身高調節高度。而且,模塊化的設計意味著可以不斷擴展。
時間精確的人機協作
機械手臂拾取物品并向工人移動,距離越靠近,移動速度越慢,以免意外碰撞。并且,機器人在到達人類同事之前完全停止,這一點很重要,以便確保工人的感受是放松的,是伸手去取物品,而不是物品突兀地伸向自己。
“對于某些與機器人一同工作的人而言,這是一種全新的體驗——特別是在我們的設置中,機器人不是固定在一個地方,有著很大的移動范圍。”Petruck 強調說。

任何人機協作都會帶來一個關鍵的技術挑戰——如何準確預測人類行為。就 CoWorkAs 而言,組裝過程中的活動檢測被用來分析工人完成組裝步驟所需要的時間。
一旦系統檢測到首次運行,算法就會計算出計劃時間與實際用時之間的差異。“這一差異可以用于準確預測下一組裝步驟的時長,這是確保機械手臂可以在正確的時間傳遞零部件的基礎,”Petruck 解釋說。過早傳遞會引起工人不必要的緊張,機器人也無法進行其他工作。
數據保護和進一步研究
這類人機協作不存在任何數據保護擔憂,因為不需要保存用戶文檔。算法只需要很少的細節來適應當前用戶。需要的只是一次運行。
此外,后續研究將著眼于人類對機械手臂的控制。這與大學研究團隊的另一名成員的工作相關,該團隊為只有頭部能移動的截癱患者開發出了一套控制系統。借助安裝在頭部的加速器,截癱患者通過頭部動作就能控制機器人。CoWorkAs 會將這些實驗提升到更高水平。
這也是我們所期待的,任何技術的發展,必定是為人類生活帶來更多的便利。
Your ideas are worth it! 期待更多的人可以用 item 的產品實現自己的想象!
(審核編輯: KEEP)
分享



