相較于市場上出現的同類機器人產品,基于自主研發技術,新松七軸機器人在負載或成本上都更優。國產機器人將跨入人機協作新時代。
眾所周知,目前較先進的傳統機器人一般最多具有六個自由度,其中,前三個自由度引導夾手裝置至所需的位置,而后三個自由度用來決定末端執行裝置的方向。在三維空間內,剛體需要六個獨立參數確定其位姿,因此,機器人的任務空間最多需要六個自由度就足夠了,一般不要求機器人具有六個以上的獨立自由度,而過多的自由度就會產生冗余自由度。
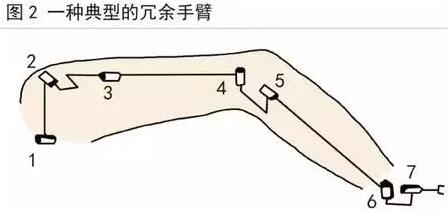
冗余度機器人,是指含有主動關節數多于完成某一作業任務所需的最少自由度數的一類機器人。其實,如上文所說,六個自由度是具有完成空間定位能力的最小自由度數,而增加的自由度便可改善機器人相關的運動學和動力學特性。
雖說真正產品化的七自由度工業機器人與傳統的六自由度,甚至更少自由度的工業機器人相比,無論是從產品種類,還是銷售占比差距都十分明顯。但正是由于其擁有有別于非冗余自由度機器人的冗余特性,使得七自由度的機器人優于六自由度機器人,而成為人們關注的焦點,也使得對冗余度機器人的研究變得日趨重要。
我國研發始于20世紀90年代初期
我國對于七軸機器人的科研工作始于20世紀90年代初,而當時項目的領軍人物正是我國已故的著名機器人技術專家、中國工程院院士張啟先,而張啟先院士的主要貢獻之一便是完成了七自由度冗余機器人樣機的研制。

上世紀80年代末,由于研制難度及其之大,國際上研制出七自由度冗余機器人樣機的國家寥寥無幾。而張啟先院士率領課題組經過幾年的艱苦拼搏,在1993年年底完成了首臺七自由度冗余機器人樣機的研制,并一次通過“863”課題驗收和部級鑒定。
盡管我國在冗余自由度機器人方面取得一定成果,但主要停留在學術論文、科研報告和實驗樣機的階段,并沒有實現真正的產品化發展,這無疑制約了我國機器人產品向高端產業化邁進的步伐。
具備諸多技術優勢
到底七軸機器人比六軸機器人強在哪兒?從技術角度看,主要有以下幾個層面。
(1)改善運動學特性
在機器人的運動學問題中,三個問題使得機器人的運動受到非常大的限制。
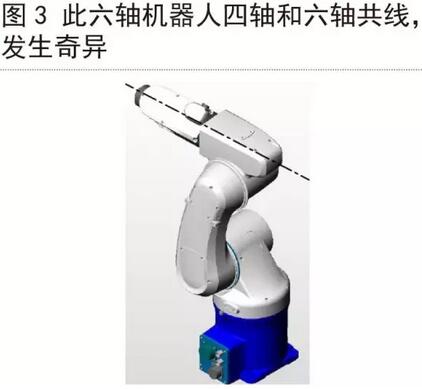
第一是奇異構型。當機器人處于奇異構型時,它的末端執行器不能繞某個方向進行運動,或者施加力矩,因而奇異構型極大的影響了運動規劃。
第二是關節位移超限。在真實工作情況下,機器人每個關節的運動的角度范圍是受到限制的,最理想的狀態是正負180度,但是很多關節是做不到的。另外,七軸機器人可以避免角速度運動過快,讓角速度分配得比較均勻。
第三是工作環境中存在障礙。在工業環境下,很多場合存在各種環境障礙,傳統的六軸機器人無法只改變末端機構的姿態,而不改變末端機構的位置。
(2)改善動力學特性
對于七軸機器人而言,利用其冗余自由度不僅可以通過運動軌跡規劃達到良好的運動學特性,并且我們可以利用其結構實現最佳的動力學性能。
七軸機器人可實現關節力矩的再分配,這里涉及到機器人的靜力平衡的問題,也就是說,作用在末端的力,通過一定的算法算出每個關節承受的力有多大。對于傳統的六軸機器人來說,其每個關節的力是一定的,它的分配可能很不合理。但是對于七軸機器人來說,我們可以通過控制算法調整各個關節的力矩,讓薄弱的環節承受的力矩盡量小,是整個機器人的力矩分配比較均勻,更加合理。
(3)容錯性
機器人在發生故障時,如果有一關節失效,傳統六軸機器人便無法繼續完成工作,而七軸機器人可以通過重新調整故障關節速度(運動學容錯)和故障關節力矩(動力學容錯)的再分配實現繼續正常工作。
國際廠商競相跟進
目前,無論從產品角度,還是從應用角度,國際上七軸工業機器人,都僅僅處于初步發展階段,但各大廠商紛紛在各大展覽會力推相關七軸機器人產品,可以想見對其未來的發展潛力還是十分看好的。
2014年11月,“四大家族”之一德國著名工業機器人制造商KUKA在2014中國國際工業博覽會機器人展上,首次發布KUKA第一款七自由度輕型靈敏機器人LBRiiwa。
LBRiiwa七軸機器人基于人類手臂進行設計,其結合集成的傳感器系統,使該輕型機器人具有可編程的靈敏性,并使其具備了非常高的精確度。而七軸的LBRiiwa所有的軸內均配備高性能碰撞檢測功能、集成的關節力矩傳感器,以實現人機協作。
七軸的設計,使得KUKA的該款產品有較高的靈活度,可輕松地越過障礙物。LBRiiwa機器人的結構采用鋁制材料設計,其自身重量只有23.9千克。其負荷有兩種,分別為7千克和14千克,使其成為首款負荷超過10千克的輕型機器人的產品。
日本知名機器人制造商,“四大家族”之一的安川電機也發布了多款七軸機器人產品。其中SIA系列機器人是輕型敏捷型七軸機器人,該系列機器人能夠提供類人的靈活性,并且能夠快速加速。該系列機器人采用輕量化和流線型設計,使其非常適合安裝在狹小的空間內。SIA系列可提供較高的有效載荷(5千克至50千克)以及較大的工作范圍(559毫米至1630毫米),很適合從事裝配、注塑、檢驗等操作。

除了輕型七軸機器人產品外,安川還發布了七軸機器人焊接系統,其高自由度能夠盡最大可能保持最適合的姿態以實現高品質的焊接效果,特別適合內面的焊接,達到最佳的接近位置。并且該產品能夠高密度布局,容易回避其與軸和工件之間的干擾,顯示出其優良的避障功能。

2014年11月,ABB在中國推出最新機器人產品YuMi,它是第一款雙臂輕型人機協作型機器人,而其每個單臂均為七個自由度,機身重量為38千克。其每條手臂的負載為0.5千克,重復定位精度可達到0.02毫米,因此特別適合小件裝配、消費品、玩具等領域。從機械手表的精密部件,到手機、平板電腦,以及臺式電腦零件的處理,對于YuMi來說都不在話下,而這正體現出該款冗余度機器人表現出的擴大可達工作空間、靈活敏捷、精確等種種優良特性。

日本著名機械制造企業那智不二越已開發出多款七軸機器人產品。早在2007年底,那智不二越便開發出七自由度的機器人“PrestoMR20”。通過采用七軸設計,使得機器人能夠像模仿人類手臂那樣執行更加復雜的工作流程,在狹窄的工作區域運動。另外,機器人前端部分(手腕)的扭矩增加到了原來傳統六軸機器人的約兩倍左右,標準配置的扭矩為20千克,通過設定動作范圍,最大可搬運30千克的物品,工作范圍達到1260毫米,重復定位精度為0.1毫米。通過采用七軸結構,MR20在機床上取放工件時可從機床側面進行作業。這樣一來,就提高了事前準備和維護等作業效率。機床間的空間能夠縮小至傳統六軸機器人的一半以下。

除此之外,那智不二越還發布了MR35(負載為35千克)、MR50(負載為50千克)兩款可在狹小空間和有障礙物場所的應用場合使用的工業機器人。

日本DAIHEN集團歐地希推出了最新的七軸機器人(FD-B4S、FD-B4LS、FD-V6S、FD-V6LS、FD-V20S)。由于有第七軸的回轉,它們可以實現像人的手腕一樣的扭轉動作,能夠實現一周以上的焊接;另外,七軸機器人(FD-B4S、FD-B4LS)將焊接電纜內藏于機器人本體,因此在示教作業時無需在意機器人與焊接夾具及工件間的干涉,動作非常順暢,焊接姿態自由度也得到了提高,能夠彌補傳統機器人因與工件或焊接夾具的干涉而造成無法進入焊接的缺憾。
RethinkRobotics是一家由著名的MIT教授羅德尼布魯克斯(RodneyBrook)創辦的機器人公司,因創造了工業機器人的價格神話而聞名。最近推出的新產品瞄準了中國的制造業市場。其雙臂工業機器人Baxter,售價僅約2萬美元。

Baxter機器人自重74千克,擁有兩個七自由度機器臂,單臂最大工作范圍為1210毫米。Baxter可同時處理不同的兩項任務以增加適用性,或者實時處理同一任務以實現輸出最大化。

Sawyer在很多方面與Baxter類似。其柔性關節采用了相同的串聯彈性驅動器,但其關節所采用的驅動器被重新設計,使其更小巧。由于采用了七軸的設計,并且工作范圍擴展至100毫米,因此能完成負載更大的工作任務,載荷可達到4千克,比Baxter機器人2.2千克的有效載荷大了不少。
我國產業布局幾何
目前,我國絕大多數工業機器人企業還尚未發布七軸工業機器人產品,其中有一部分表示正在研發相關產品,會在年內有相關產品問世,而另有一些企業則表示對七軸工業機器人產品有關注,但尚未計劃設計研發相關產品。
作為我國機器人產業龍頭企業的新松,于近期發布了首臺輕型七軸人機協作型機器人,其自身重量為29千克,負載為5千克,重復定位精度可達到0.02毫米,工作半徑可達800毫米。它具備快速配置、牽引示教、視覺引導、碰撞檢測等功能,特別適用于布局緊湊、精準度高的柔性化生產線,滿足精密裝配、產品包裝、打磨、檢測、機床上下料等工業操作需要。
存在的主要問題
我國的機器人產業在七軸工業機器人的理論研究有了很大進步,而商業化產品方面仍與國外有較大差距。究其原因,主要有以下兩個方面:
一是自主創新能力弱。缺乏核心及關鍵技術的原創性成果和創新理念,我國工業機器人總體技術與國外先進水平相比,差距在十年以上。
二是企業盈利能力較低,研發資金短缺。核心零部件技術的缺失導致企業生產成本高企,加之外資廠商紛紛降價,2015年70%以上企業的本體業務處于虧損狀態。
如何解決
針對以上問題,三項建議:
一是推進創新環境建設。加強政產學研用合作與對接;建設各種先進機器人技術的實驗環境;加大資金扶持力度,支持公用技術平臺建設。
二是重視下一代技術和標準。除了當前著手攻克伺服電機、精密減速器等關鍵零部件技術之外,也要重視人工智能、感知、識別、驅動和控制等下一代技術的研發。
三是壯大機器人產業人才隊伍。將機器人技術進一步納入相關學科建設體系;著力培養和引進高水平科研帶頭人;運用職業培訓并通過實際項目鍛煉來培育高技能人才。

看到這里,金粉們會問,7軸機器人這么厲害,那這個幾軸是怎么區分的?下面小編給您簡單介紹一下!
論七軸機器人和一軸機器人的差別到底有多大
現如今,工業機器人被廣泛應用于各行各業,但是我們也發現,工業機器人的軸數并不相同,那么它們到底應該有幾個軸呢?
所謂工業機器人的軸可以用專業的名詞自由度來解釋,如果機器人具有三個自由度,那么它可以沿x,y,z軸自由的運動,但是它卻不能傾斜或者轉動。當機器人的軸數增加,對機器人而言,就是更高的靈活性。那么現在工業機器人都有多少個軸呢?
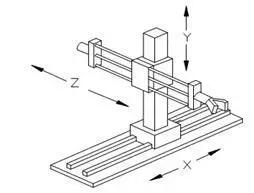
三軸機器人也被稱為直角坐標或者笛卡爾機器人,它的三個軸可以允許機器人沿三個軸的方向進行運動,這種機器人一般被用于簡單的搬運工作之中。
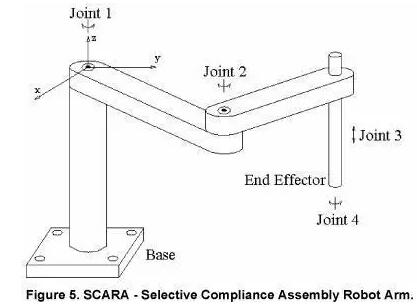
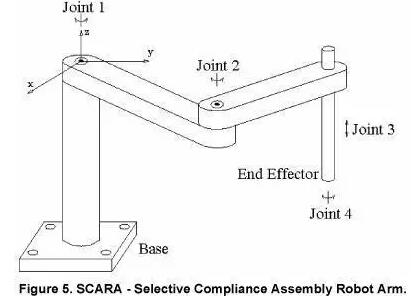
四軸機器人,可以沿著x,y,z軸進行轉動,與三軸機器人不同的是,它具有一個獨立運動的第四軸,一般來說SCARA機器人就可以被認為是四軸機器人。
五軸是許多工業機器人的配置,這些機器人可以通過x,y,z三個空間周進行轉動,同時可以依靠基座上的軸實現轉身的動作,以及手部可以靈活轉動的軸,增加了其靈活性。
六軸機器人可以穿過x,y,z軸,同時每個軸可以獨立轉動,與五軸機器人的最大區別就是,多了一個可以自由轉動的軸。六軸機器人的代表就是優傲機器人,通過機器人身上的藍色蓋子,你可以很清楚的計算出機器人的軸數。

七軸機器人,又稱為冗余機器人,相比六軸機器人額外的軸允許機器人躲避某些特定的目標,便于末端執行器到達特定的位置,可以更加靈活的適應某些特殊工作環境。
(審核編輯: 智匯小蟹)
分享



