-

VR是近年來出現的高新技術,也稱靈境技術或人工環境;AR通過電腦技術,將虛擬的信息應用到真實世界,真實的環境和虛擬的物體實時地疊加到了同一個畫面或空間同時存在;MR既包括增強現實和增強虛擬,指的是合并現實和虛擬世界而產生的新的可視化環境。 [詳情]
-
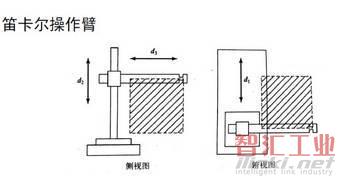
機器人的基本工作原理是示教再現;示教也稱導引,即由用戶導引機器人,一步步按實際任務操作一遍,機器人在導引過程中自動記憶示教的每個動作的位置、姿態、運動參數/工藝參數等,并自動生成一個連續執行全部操作的程序。 [詳情]
-

人類對于微觀世界的認知有著漫長的歷史。自300年前第一臺顯微鏡問世以來,人們便開啟了探索微觀世界的大門。隨著科學技術的發展,光學顯微鏡、透射電子顯微鏡和掃描電鏡逐漸作為工具被人們熟知,并且,應科學發展的需求,各項技術均在不斷的創新與發展。 [詳情]
-

“監控系統”是安防系統中應用最多的系統之一,監控系統一般是由前端攝像機和后端軟件系統組成,目前監控系統在全國各大、中、小城市都有較為廣泛的應用。 [詳情]
-
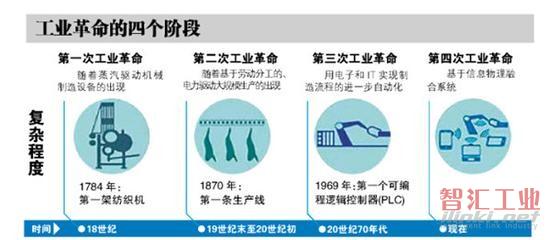
要理解工業4.0,我們得先看下目前的狀況,我們稱之為工業3.X,用修真小說的時髦描述,也就是3.0中后期,這種狀態叫做完全的自動化和部分的信息化。 [詳情]
-

5月26日,中國科學院新疆理化技術研究所承擔的中科院科研裝備研制項目“光電催化過程原位光譜圖像分析系統研制”通過了中科院條財局組織的專家驗收。 [詳情]
-
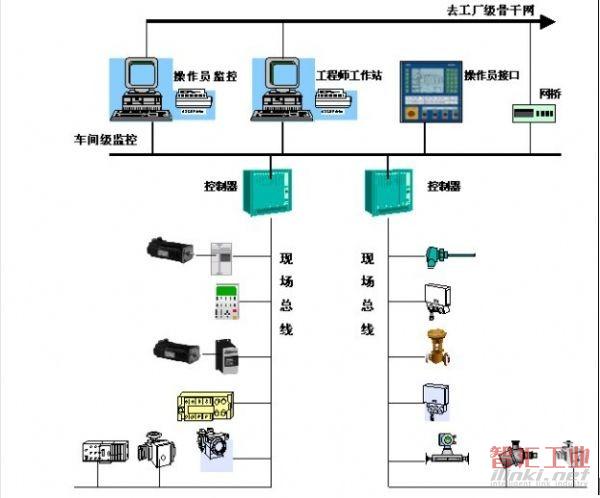
目前國際上有40多種現場總線,但沒有任何一種現場總線能覆蓋所有的應用面,按其傳輸數據的大小可分為3類:傳感器總線(sensorbus),屬于位傳輸;設備總線(devicebus),屬于字節傳輸;現場總線,屬于數據流傳輸。 [詳情]
-

幫助工業機器人無序抓取,Alsontech提供實時性好、高性價比3D定位系統
目前國內工業機器人集成商仍然面臨著機器人在復雜視覺識別環境下難以高速度工作的難題,尤其體現在工業機器人分揀行業。在分揀領域,工業機器人只能完成固定模式物體的抓取,對于復雜堆疊物體的識別和分揀,依然有90%以上通過人工方式完成,極大的限制了工業生產的效率。 [詳情]
-

采用瑞薩R-Car入門工具包使軟件開發人員能夠輕松獲取運行該項目開發的軟件和硬件環境,快速、輕松地為下一代聯網汽車開發車載信息娛樂(IVI)應用軟件。 [詳情]
-

步進電機作為控制用的特種電機,是將電脈沖轉化為角位移的執行機構。當步進驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度(稱為“步距角”),它的旋轉是以固定的步進角度一步一步運行的。 [詳情]
-

工業視覺應用一般分成四大類:定位、測量、檢測和識別,其中測量對光照的穩定性要求最高。 [詳情]
-
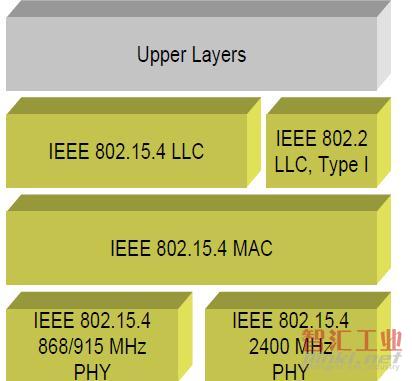
許多標準化工作由包括電氣和電子工程師協會(IEEE),歐洲電信標準協會(ETSI)和第三代合作伙伴計劃(3GPP)以及工業聯盟(如WEIGHTLESS-SIG), LORa?聯盟和DASH7聯盟等在內的不同的標準化機構進行的。 [詳情]
-
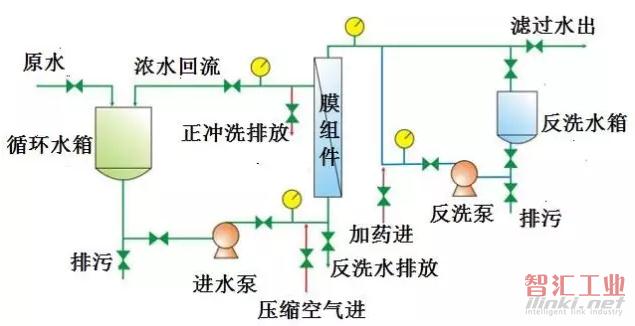
連續膜過濾技術是一種新型膜處理技術,專為自來水、地下水、地表水的除濁澄清凈化、污水深度處理、RO系統的預處理以及一些特殊的分離工藝而設計,主要特點如下: [詳情]
-
萊斯大學的助理教授 Anshumali Shrivastava 說,「它應用于任何深度學習架構,該技術都能亞線性地擴展,也就是應用到的深度神經網絡越大節省的計算越多。」 [詳情]
-

不久前,我國自主研發的首款大型太陽能彩虹無人機圓滿完成20000米高空臨近空間飛行試驗。此次試驗成功,標志著我國已成為繼美、英之后第三個掌握該技術的國家。同時也標志著我國的無人機技術已經達到世界先進水平。 [詳情]



